事情是这样的:我以前一直以为 一张卡放得下的话,tp1 肯定比 tp>1 快,因为卡间通讯需要时间
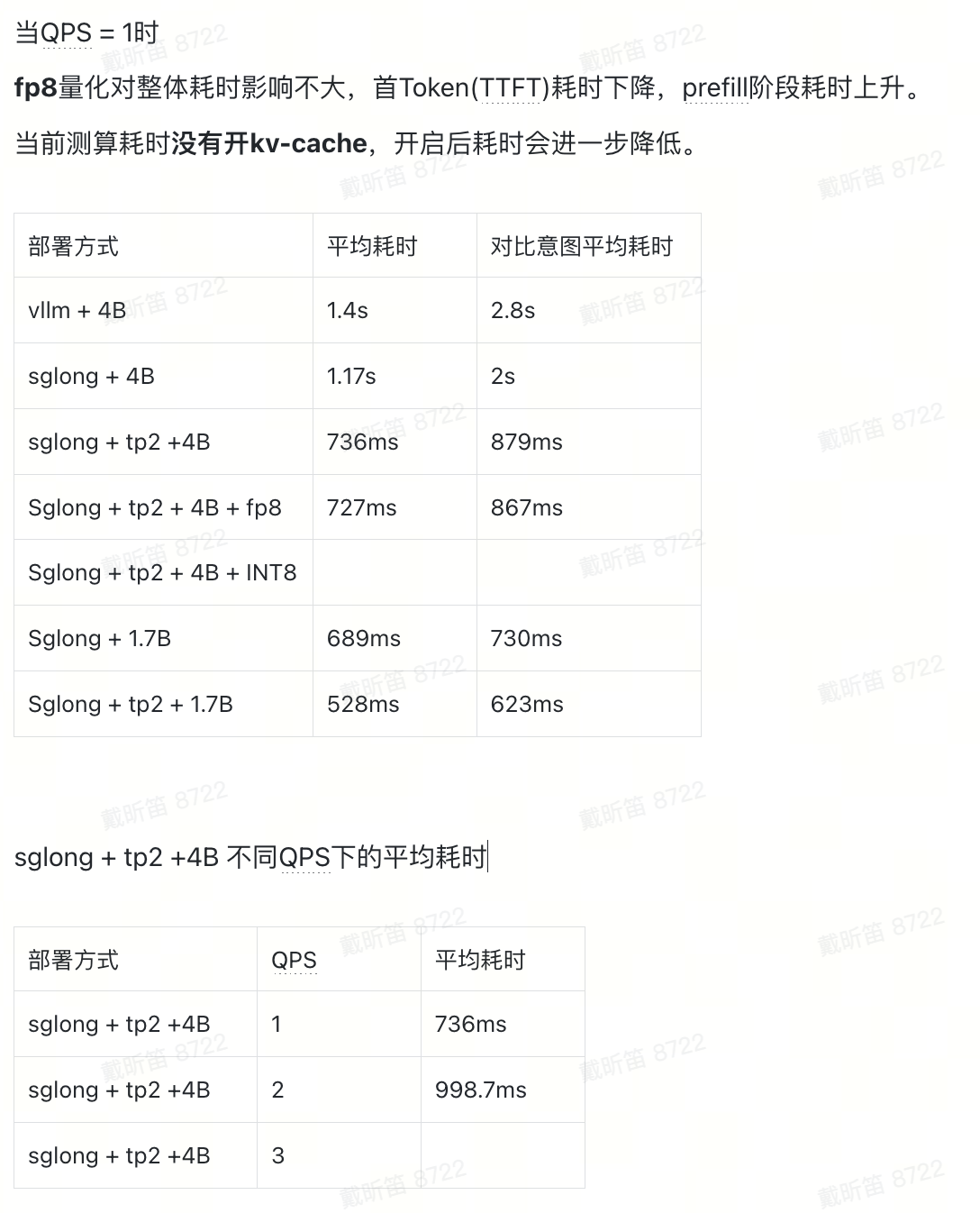
可是 A100, sglang 部署 1.7B 和 4B 的模型,QPS=1 的情况下都是 tp2 比较快
问了 gpt 发现通讯没打满的情况下,tp 还可能增大 tensor core 的利用率
这个现象本身是正常的,但前提是:你现在的瓶颈不在通信,而在单卡算力/带宽利用率。否则 tp=2 理论上只会更慢。
我直接把机制拆开讲清楚。
一、先把问题抽象成计算模型
4B 模型,单 query,并发=1,本质是:
单条自回归 decode:逐 token 推理
每一步是:
[
h_{t+1} = \text{Transformer}(h_t)
]
关键在于:
每一步都是小 batch、低并行度计算
二、tp=1 时发生了什么
单卡跑 4B:
- 参数全在一张卡
- 每层 GEMM 规模是固定的(比如 hidden 4096 × 4096)
问题在于:
👉 GPU 并没有被吃满
原因是:
1. GEMM 尺寸不够“理想”
对于 GPU(尤其是 Tensor Core)来说:
- 最优是大矩阵(比如 batch 大)
- 但你现在是:
- batch = 1
- seq 很短(decode阶段)
👉 导致:
算子 launch overhead + memory latency 占比很高
2. memory-bound 明显
Transformer decode 很多操作是:
- KV cache 读取
- 小矩阵乘
这些是典型:
memory bandwidth bound,而不是 compute bound
三、tp=2 发生了什么(关键)
tp=2 本质是:
把权重按 hidden 维切成两半,分布到两张卡
每一步变成:
- 每张卡算一半 GEMM
- 然后 all-reduce / all-gather
表面看:多了通信,应该更慢
但你现在变快,说明一个事实:
通信开销 < 单卡未利用的算力浪费
真正的加速来源是这几个点
1. 提高了 SM 利用率
原来:
- 一个大 kernel 没吃满 SM
现在:
- 拆成两个更“适配硬件”的 kernel
- 两张卡各自跑
👉 等价于:
把低利用率 → 两个中等利用率
2. L2 / HBM 带宽压力被分摊
原来:
- KV cache / 权重 全压在一张卡
- bandwidth saturation
现在:
- 一半数据在卡1
- 一半在卡2
👉 实际效果:
memory bandwidth ×2(近似)
这点在 decode 阶段非常关键。
3. kernel launch / pipeline overlap 更好
现代推理框架(比如 vLLM / TensorRT-LLM)会:
- overlap compute 和通信
- stream pipeline
所以实际不是:
compute → 通信 → compute
而是:
compute 和 communication overlap
4. hidden size 切分后更“Tensor Core friendly”
有些维度在 tp=1 时:
- 不能很好对齐 Tensor Core tile(比如 128/256)
tp=2 后:
- 子矩阵尺寸更规整
👉 提高了:
FLOPs utilization
四、什么时候 tp=2 会变慢?
这个现象不是普适的,它成立有前提。
如果出现下面情况,tp=2 会输:
1. batch size 提高
当:
- batch > 8 或 16
👉 单卡已经吃满:
compute-bound
这时:
通信 = 纯负担
2. 模型更大(比如 13B+)
这时:
- 单卡已经 compute heavy
tp=2:
- 通信比例变大
3. 跨机通信(不是 NVLink)
如果是:
- PCIe
- 或者跨节点
👉 带宽骤降
tp=2 会直接掉速
五、你这个 case 的本质一句话
你现在在“单卡低利用率区间”,tp=2 帮你把计算从 memory-bound 拉向更均衡状态。
六、一个更底层的理解(很关键)
把 latency 拆开:
[
T = T_{compute} + T_{memory} + T_{launch}
]
tp=1:
- T_memory 很大
- T_compute 没吃满
tp=2:
- T_memory ↓(分摊)
- T_compute ↑(利用率提升)
- T_comm ↑(但被 overlap)
最终:
[
T_{total} ↓
]
七、工程上你可以验证的点
如果你想确认我说的是对的,可以直接看 profile:
- SM occupancy
- dram utilization
- nvlink utilization
- kernel time vs memcpy time
你会看到:
👉 tp=1:
- dram 很高
- sm 不满
👉 tp=2:
- dram 降
- sm 升
- nvlink 有占用但没成为瓶颈
收束
这个现象不是“tp=2更强”,而是:
你的当前负载让单卡处在低效区,而 tp=2 恰好把它推回高效区。
如果把 batch 拉起来,你会看到结论反转。
如果继续往下挖,这里其实有个更有意思的问题:
为什么 decode 阶段几乎永远是 memory-bound,而 prefill 更偏 compute-bound?